

If you’ve searched chas6d lately, you’ve probably noticed something strange: every page tells you a different story. One calls it a cybernetic AI framework with six dimensions. Another swears it’s a sleek digital platform. A third describes a six-step productivity method for remote teams. They read as confident and authoritative, and they contradict each other completely. So which one is true?
Here’s the honest answer most of those pages won’t give you. “chas6d” is a variant spelling of Cas6D, a genuine computer-vision method published at the 2024 International Conference on 3D Vision. That part is real, sourced, and built by named researchers. The elaborate “Cybernetic Hierarchical Adaptive Systems in Six Dimensions” framework you keep running into has no paper, no author, and no source behind it. It looks like AI-generated content that grew up around a real but obscure research term.
This guide separates the two for good. You’ll learn what the real Cas6D actually does, where the invented “CHAS6D” came from, a quick test to tell which one any page is describing, and exactly where to find the primary source. By the end, you’ll be able to spot the fiction inside a sentence or two.
The Real One: What is Cas6D?
Cas6D is a method for figuring out an object’s exact position and orientation in 3D space from just a handful of ordinary photos. In technical terms, it does 6DoF pose estimation. Six degrees of freedom means the object’s location (x, y, z) plus its rotation on three axes. Robots and augmented-reality systems need this to interact with the physical world.

What made Cas6D notable is what it doesn’t require. Older approaches leaned on CAD models of the object or expensive depth sensors. Cas6D works from regular RGB images alone, the kind a webcam or phone produces, and it handles objects it has never seen before, using only a few reference views. No 3D scan, no depth camera, no per-object retraining.
The method works in three broad moves:
- Detect. A self-supervised Vision Transformer matches features across views to find the object in a new image, even with very few reference shots.
- Initialize. It picks the closest-matching reference poses as starting guesses.
- Refine. A cascade process narrows the pose range step by step, correcting the large gap between a rough first guess and the true position. That gap is the failure point where sparse-view methods usually break down.
On standard benchmarks, the results held up. Cas6D reported accuracy gains of roughly 9.2% over OnePose++ and 3.8% over Gen6D on the Proj-5 metric in a 32-shot setting, tested on the LINEMOD and GenMOP datasets. Those are real, named competing methods and real evaluation datasets, the kind of specifics the invented “CHAS6D” pages never produce.
Where Cas6D came from
The paper is titled “Learning to Estimate 6DoF Pose from Limited Data: A Few-Shot, Generalizable Approach Using RGB Images.” It was written by Panwang Pan and five co-authors, with affiliations spanning ByteDance, UT Austin, MIT, and CUHK, and presented at 3DV 2024. The code is open-sourced on GitHub.
The field has kept moving since. A 2025 follow-up method, FS-Gen6D, reported beating Cas6D by around 6.88 and 5.55 points (Proj-5, 16-shot) on those same two datasets. That’s how you know a research term is real: other researchers build on it, benchmark against it, and try to beat it. Invented terms don’t generate follow-up papers.
The invented one: where did “CHAS6D” come from?
Now the part nobody else will tell you. The popular definition of “CHAS6D” as Cybernetic Hierarchical Adaptive Systems in Six Dimensions has no traceable origin. There’s no paper, no company, no documentation, no named author. Just a cluster of blogs that appeared recently, all describing an elaborate framework that doesn’t exist anywhere outside those blogs.
The giveaway is that they don’t agree with each other. Across the current results, “chas6d” is defined as:
- a self-learning AI framework with six “dimensions”
- a “modern digital platform” for smooth online experiences
- a productivity workflow with a six-step Clarify-Hypothesize-Analyze process
- a multidimensional design model for architecture and products
A real concept has one definition. Four contradictory ones, each padded with fabricated proof, point to something else. One of these pages even cites a study claiming 80% of businesses improved after adopting CHAS6D, attributed to a vague “Tech Review.” That study doesn’t exist. It’s the sort of authoritative-sounding filler that AI generates when asked to write convincingly about nothing.
Our read: this is what a manufactured keyword looks like in the wild. A term gets a search-volume number in an SEO tool, content farms notice, and they mass-produce articles to capture the traffic, inventing meaning as they go, each one borrowing and mutating the last. The real “Cas6D” likely seeded it; the spelling drifted to “chas6d,” and the fiction compounded from there.
Cas6D vs. “CHAS6D”: How to Tell Which One a Page Means
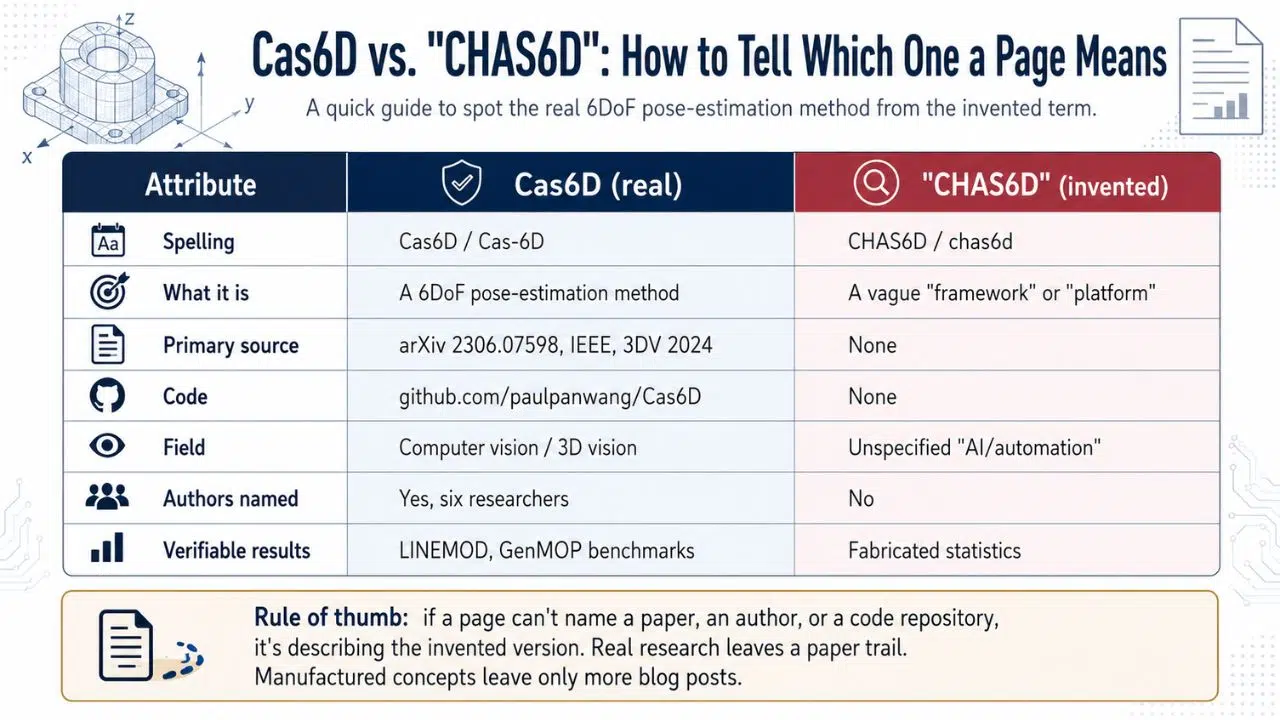
When you land on a “chas6d” article, this table tells you within seconds whether you’re reading about the real method or the invented one.
| Attribute | Cas6D (real) | “CHAS6D” (invented) |
|---|---|---|
| Spelling | Cas6D / Cas-6D | CHAS6D / chas6d |
| What it is | A 6DoF pose-estimation method | A vague “framework” or “platform” |
| Primary source | arXiv 2306.07598, IEEE, 3DV 2024 | None |
| Code | github.com/paulpanwang/Cas6D | None |
| Field | Computer vision / 3D vision | Unspecified “AI/automation” |
| Authors named | Yes, six researchers | No |
| Verifiable results | LINEMOD, GenMOP benchmarks | Fabricated statistics |
The rule of thumb: if a page can’t name a paper, an author, or a code repository, it’s describing the invented version. Real research leaves a paper trail. Manufactured concepts leave only more blog posts.
Is “chas6d” Worth Your Attention?
Depends on why you’re here. If you’re a computer-vision engineer or researcher, yes. The real Cas6D is a legitimately useful approach for few-shot pose estimation without CAD models, and the follow-up work is worth tracking. Start with the arXiv paper and the GitHub repo.
If you came looking for a “CHAS6D platform” to sign up for or an “AI framework” to adopt at work, there isn’t a real product or standard behind that meaning. What you found was content built to rank, not to inform. Knowing that is the most useful thing this page can give you.
Frequently Asked Questions (FAQs) on Chas6d vs Cas6D
Is chas6d the same as Cas6D?
Effectively, yes. “chas6d” is a misspelled or SEO-variant rendering of Cas6D, the real research method. The extra “h” and the lowercasing are artifacts of how the term spread online, not a separate concept.
Is CHAS6D a real AI framework?
No verifiable source supports the “Cybernetic Hierarchical Adaptive Systems in Six Dimensions” definition. It appears across several recently published blogs, but with no paper, company, author, or documentation behind it. Those are the hallmarks of AI-generated content rather than a real framework.
What is 6DoF pose estimation in simple terms?
It’s working out exactly where an object is and how it’s oriented in 3D space: its position along three axes plus its rotation on three axes, six values in total. Robots use it to grasp things; AR apps use it to anchor digital objects to real ones.
Does Cas6D need a CAD model or a depth camera?
No. That’s its main selling point. Cas6D estimates pose from ordinary RGB images using only a few reference views, without a CAD model, a depth sensor, or retraining for each new object.
Where can I read the original Cas6D paper?
It’s on arXiv (2306.07598), published through IEEE Xplore for 3DV 2024, with code on GitHub.
Why are there so many different definitions of chas6d online?
Because the term became a target for AI-driven content farming. When an SEO tool reports search volume for a term, low-quality publishers rush to capture it, generating articles that invent meaning to fill the page. With “chas6d,” each one borrowed and altered the last, producing the contradictory definitions you see now.
The Bottom Line
Strip away the noise and “chas6d” comes down to one real thing and one invented thing. The real thing is Cas6D, a 2024 method for reading an object’s 3D pose from a few plain photographs. The invented thing is a “Cybernetic Hierarchical Adaptive Systems” framework that exists only in the blogs describing it.
The next time you hit a “chas6d explained” article, you’ll know which one you’re reading inside a sentence or two. Check for a paper, an author, and a repo. If they’re missing, you’re looking at the fiction. It’s a small term, but it’s a clean example of how AI content can manufacture a topic out of almost nothing and how quickly a real idea gets buried under invented ones.






























