“Self-driving” is one of the most overused phrases in modern car tech. Some cars can steer and brake for you on a highway. Others can park themselves. A few can handle limited routes with no driver input at all. The problem is that these features get lumped together, even though they demand very different levels of attention from the human in the driver’s seat.
That is why the SAE scale matters. It breaks driving automation into six steps, from Level 0 to Level 5. In this article, you’ll learn the responsibilities at each step, the key terms that explain the differences, and the real-world limits that shape what you can safely expect. We’ll also clear up the confusion between driver assistance and true automated driving using the most practical lens available: autonomous driving levels 0–5.
What you’ll learn in this guide
| Section | What you’ll take away |
| Definitions | What “autonomous driving” means in practice |
| SAE framework | The simple rules behind Levels 0–5 |
| Level-by-level breakdown | What the car does vs what the human must do |
| Tech overview | Sensors, software, and monitoring systems |
| Safety and responsibility | Why Level 2 vs Level 3 is such a big deal |
| Checklist | How to judge an automation claim quickly |
| FAQs | Direct answers to common search questions |
What is autonomous driving?
Autonomous driving means a vehicle can perform driving tasks that a human usually performs. That sounds simple, but the detail that matters is responsibility. When the system is active, who is supposed to watch the road? Who is supposed to react if something unexpected happens? These two questions decide whether a feature is a convenience tool or a true automation system.
People often call any advanced feature “autonomous.” But most features on the road today are driver assistance. They can control steering, speed, or both in limited conditions, yet they still require constant human supervision. True automated driving starts when the system can monitor the environment within defined limits and manage the driving task without needing constant oversight.
Autonomous driving is also not a single “on/off” capability. It is a spectrum. That spectrum is best explained using six levels, which clearly define what the system does and what the driver must do. Once you think in levels, the marketing terms become less confusing and the safety expectations become more realistic.
Autonomous driving vs common labels
| Label people use | What it usually means | What to verify |
| “Autopilot” / “Pilot” | Often highway assistance | Who monitors the road? |
| “Hands-free” | Often steering without hands | Are eyes still required on road? |
| “Self-driving” | Varies a lot | What level is it actually? |
| “Automated driving” | Higher capability within limits | What is the ODD and fallback? |
The Framework: SAE Levels 0–5 (what the levels actually measure)
The SAE framework exists to create a shared language. It avoids vague claims and focuses on clear roles. Instead of asking “How smart is the car?” it asks “Who is doing the driving job?” That shift is why the levels are useful for readers, engineers, and policymakers alike.
The levels are not a score for how “good” a system is. A Level 2 system can be very smooth and comfortable, and still require full driver attention. A Level 4 system can be truly driverless, and still be limited to a small zone or a specific set of conditions. The levels describe responsibility, not bragging rights.
There are three core concepts behind the levels: the dynamic driving task, the operational design domain, and the fallback. If you understand these three, you can understand every level without memorizing long definitions.
What the SAE levels measure
| Concept | What it means | Why it matters |
| Driving task (DDT) | Steering, speed, monitoring, responding | Defines who is “driving” |
| Operating limits (ODD) | Where/when the system is designed to work | Explains why it works sometimes |
| Fallback | Who handles trouble when the system hits limits | Defines responsibility during failure |
Dynamic Driving Task (DDT)
Driving is not just steering and braking. It also includes perception and judgment. The dynamic driving task bundles the main things a driver must do moment by moment. It includes controlling the car laterally and longitudinally, watching the environment, and responding to events.
This matters because many features control the vehicle but do not truly “drive” in the human sense. If a system can steer and brake but expects you to watch the road, it is still relying on you for a critical part of the DDT. That is a key reason Level 2 is still not self-driving.
When you evaluate any automation claim, ask which parts of the DDT the system handles and which parts you still own. That one question reveals the true level faster than any brand name.
Operational Design Domain (ODD)
ODD is the system’s comfort zone. It describes the exact conditions where the system is designed to operate safely. That can include road types, speed ranges, weather conditions, lighting, or even specific geographic boundaries.
ODD is not a minor detail. It is the boundary between “works well” and “should not be used.” A system that is excellent on a divided highway may struggle on city streets. A system that performs well in clear weather may reduce performance in heavy rain or fog.
ODD also explains why higher levels do not automatically mean “works everywhere.” A Level 4 system can be truly driverless and still be limited to a mapped area or a controlled route.
Fallback: who handles the edge case
Fallback is what happens when the system cannot continue safely. This could be because of a sensor issue, confusing road markings, unexpected obstacles, or a condition outside the ODD. Someone must be responsible for keeping things safe in that moment.
At lower levels, the driver is always the fallback. At Level 3, the system can drive within limits, but it may ask the human to take over. At Level 4, the system is designed to manage the fallback within its ODD, often by reaching a safe stop or a minimal-risk maneuver.
This is why Level 2 and Level 3 feel similar on the surface but differ deeply in responsibility. One keeps the human “on duty” constantly. The other lets the system take over the monitoring job, which changes everything about safety design.
The 6 levels explained (Level 0 to Level 5)
This section is the heart of the article. Think of the levels as a ladder. Each rung shifts more of the driving job from human to machine. But the biggest shift is not about comfort. It is about supervision and accountability.
If you only remember one idea, remember this: Levels 0–2 are driver support. Levels 3–5 are automated driving within defined limits (and Level 5 aims beyond those limits). That doesn’t mean Levels 3–5 are “better” in every way. It means the system is expected to take over more of the driving responsibility.
As you read the levels below, keep checking three items: who controls the car, who monitors the road, and who is responsible when the system reaches a limit. Those three items will guide you better than any marketing label.
Quick overview of Levels 0–5
| Level | Common name | Who monitors the road? | Who handles fallback? | Where it usually fits |
| 0 | No automation | Human | Human | Basic driving |
| 1 | Driver assistance | Human | Human | One-axis support |
| 2 | Partial automation | Human | Human | Highway assistance |
| 3 | Conditional automation | System (within ODD) | Human (when requested) | Limited conditions |
| 4 | High automation | System (within ODD) | System (within ODD) | Geofenced use |
| 5 | Full automation | System | System | “Anywhere” goal |
Level 0: No driving automation
Level 0 means the human drives. The vehicle may support the driver with warnings and momentary interventions, but it is not performing sustained automation. You steer, you brake, you accelerate, and you watch the road.
This level still matters because many safety features exist here. Alerts can reduce risk, and emergency interventions can help in narrow moments. But they do not change the core responsibility. At Level 0, you are the driver in every meaningful sense.
It is also common for drivers to overestimate these features. A warning beep is not a driving decision. A brief brake pulse is not a driving plan. Level 0 systems can help, but they cannot replace attention.
Level 0 summary
| What the car can do | What you must do | Best use case |
| Alerts and brief help | Drive and monitor constantly | Basic safety support |
Level 1: Driver assistance
Level 1 is the first step where the system can provide sustained assistance. The key detail is “one axis.” It can help with steering or help with speed, but not both at the same time. You still monitor the road continuously.
Level 1 is popular because it reduces workload without changing responsibility. Adaptive cruise control can manage speed in traffic. Lane keeping can provide gentle steering support. These features can make long drives less tiring, but they are not designed to handle complex situations alone.
Drivers should treat Level 1 like a helpful teammate. It can take a small part of the job, but it does not make decisions the way a human does. You still need to watch for unexpected behavior, construction zones, and road users who do not follow the rules.
Level 1 summary
| What the car can do | What you must do | Common examples |
| Assist steering OR speed | Monitor road and respond | ACC, lane keeping assist |
Level 2: Partial driving automation
Level 2 is where many modern cars sit today. At this level, the system can control both steering and speed at the same time in specific conditions. It can keep the car centered in the lane and maintain distance from a vehicle ahead. It can feel like the car is “driving.”
But the key rule remains: the human monitors the driving environment. That means you must watch the road, detect hazards, and be ready to intervene instantly. Even if the system is smooth for miles, you are still responsible for the situation.
This is also the level where confusion is most dangerous. Some drivers assume the car “sees” everything. In reality, Level 2 systems can miss edge cases. They can struggle with unusual lane markings, debris, glare, poor weather, or complex merges. That is why many systems include driver monitoring or steering-wheel attention checks.
If you use Level 2, think of it as advanced cruise control plus steering support. It can reduce fatigue, but it cannot replace awareness. The safest habit is to keep your attention on the road and your hands ready, even if the system allows brief hands-free periods.
Level 2 summary
| What the car can do | What you must do | Common risks |
| Steer + brake/accelerate in conditions | Watch road; intervene instantly | Over-trust, distraction, edge cases |
Level 3: Conditional driving automation
Level 3 is a major shift. Within its ODD, the system is expected to monitor the environment and handle the driving task. That means the system watches the road while it is engaged, not the human. However, the human must be ready to respond to a takeover request.
This handoff is the tricky part. Humans are not naturally good at “instant readiness” after being passive. If the system drives for several minutes, the driver can become out of the loop. That is why Level 3 demands strong design: clear alerts, enough time to take over, and strict boundaries for where the feature is allowed.
Level 3 is often limited to specific conditions like certain highway scenarios. It may only work below a certain speed, or only on certain road types, or only in specific regions. These limits are not weaknesses. They are safety boundaries.
A simple way to remember Level 3 is this: the car can drive and watch the road, but it may still need you as a backup when it reaches its limit. That “backup role” is what separates Level 3 from Level 4.
Level 3 summary
| What the car can do | What you must do | Core challenge |
| Drive and monitor within ODD | Take over when requested | Safe handoff and readiness |
Level 4: High driving automation
Level 4 is high automation within a defined ODD. The system can drive without expecting a human to intervene as a fallback. If it hits a problem inside its ODD, it should be able to handle it by reaching a safe state, like pulling over or stopping safely.
This does not mean Level 4 works everywhere. It means inside its allowed domain, it is designed to handle the driving task and the fallback. That is why Level 4 often appears in constrained environments. The system can be extremely capable, but only where it has been designed, tested, and validated to operate.
Level 4 can look like a driverless service in a geofenced area, or an automated shuttle on a set route. The important point is not the business model. It is the safety claim: no human is required to rescue the system in normal operation within its ODD.
For readers, Level 4 is where “driverless” becomes realistic, but only under conditions that the system can reliably understand. The world outside that domain remains hard.
Level 4 summary
| What the car can do | What you must do | Typical pattern |
| Drive + handle fallback within ODD | Possibly nothing | Geofenced zones, controlled routes |
Level 5: Full driving automation
Level 5 is the full goal. The system can perform all driving tasks under all conditions a human could handle. In plain terms, it can drive anywhere, in any weather, on any road, without a human driver.
That is a massive requirement. Real-world driving includes rare and messy events: confusing temporary signage, unusual police directions, flooded roads, animals crossing, unpredictable pedestrian behavior, and more. Humans solve these with common sense, experience, and social cues. Turning those into reliable software behavior is difficult.
This is why Level 5 is not just “Level 4 plus a little extra.” It is a leap from operating in a defined domain to operating everywhere. Even if technology keeps improving quickly, Level 5 requires solving a huge variety of edge cases.
For most people today, Level 5 is better viewed as a destination rather than a current product category. It is the idea of true go-anywhere automation, not a feature you can realistically assume is available across the broader market.
Level 5 summary
| What the car can do | What you must do | Biggest obstacle |
| Drive anywhere a human can | Nothing | Unlimited edge cases, all conditions |
Autonomous driving levels 0–5 compared to ADAS and “self-driving”
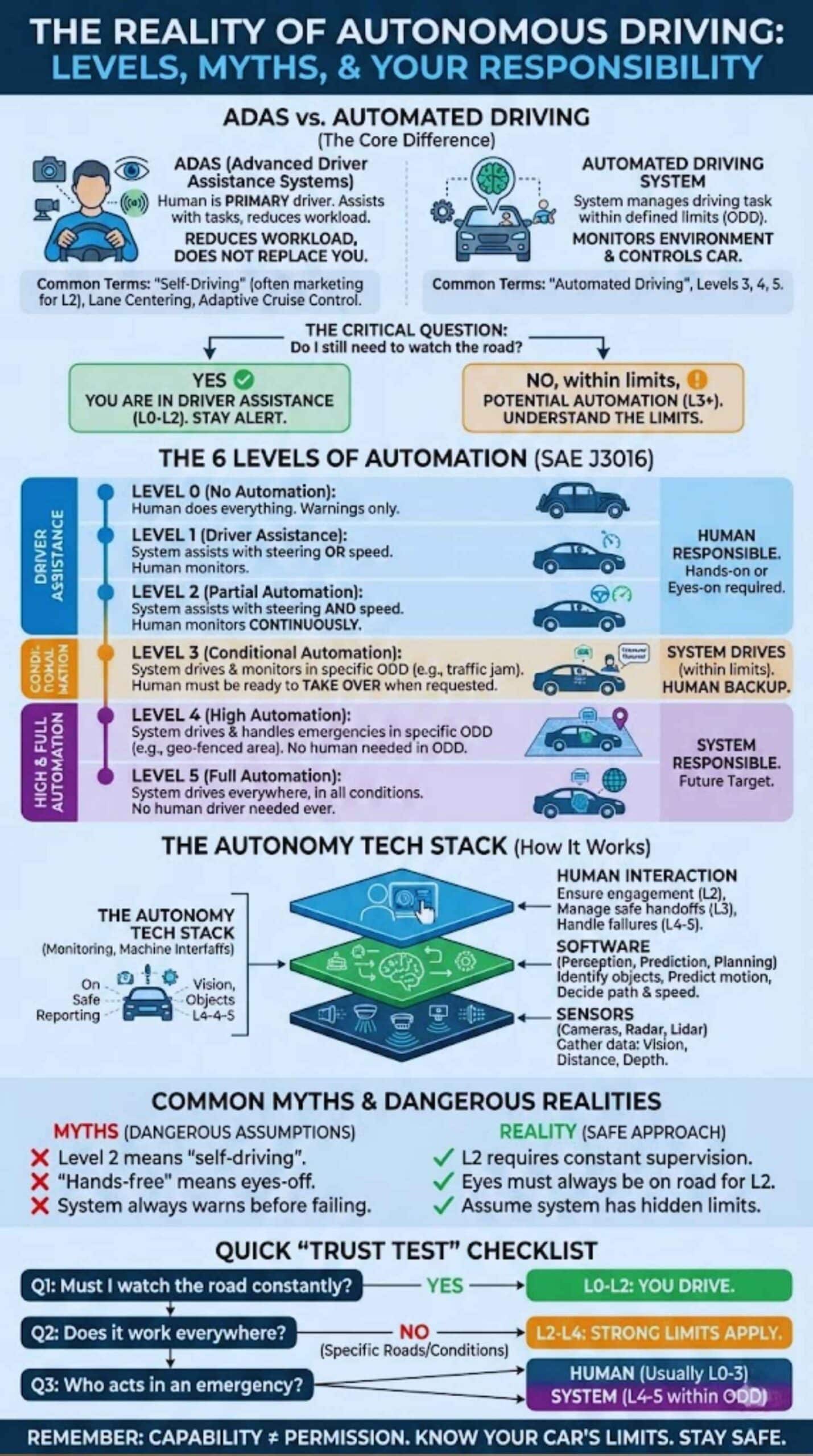
This is where many readers want clarity. ADAS is not the same as autonomous driving, even if it feels advanced. ADAS is a set of features designed to assist the human driver. It can reduce workload, but it usually keeps the driver fully responsible.
When people say “self-driving,” they often mean Level 2 systems that combine lane centering and adaptive cruise control. That can be useful, but it is still supervision-based driving. The driver remains accountable for what happens.
When engineers say “automated driving,” they are usually talking about systems that can manage the driving task and monitor the environment within defined limits. That begins at Level 3 and expands through Level 4 and Level 5.
So the practical takeaway is simple. Ignore the label and ask: do I still need to watch the road? If the answer is yes, you are in driver-assistance territory, even if the feature feels impressive.
Term comparison
| Term | What it commonly refers to | Typical SAE range |
| ADAS | Driver assistance features | Levels 1–2 |
| Automated driving system | System drives within ODD | Levels 3–5 |
| “Self-driving” | Marketing umbrella | Varies |
What tech enables these levels?
Autonomy is not one invention. It is a stack of technologies working together. As the levels rise, the system must become better at sensing, understanding, predicting, and controlling. It also needs stronger fail-safes and clearer human interaction design.
At the base are sensors. Cameras provide rich visual information. Radar helps measure distance and speed, often in poor visibility. Some systems use lidar for detailed depth perception. Others rely more heavily on camera-and-radar combinations. Each approach has strengths and tradeoffs.
Then comes software. The system must identify objects, understand lanes, track motion, and decide what to do next. It must handle not only clear and common situations, but also rare events that still matter for safety. It must also know when it is uncertain and must reduce capability or disengage safely.
Finally, there is the human element. At Level 2, the system must keep the driver engaged and attentive. At Level 3, it must manage safe handoffs. At Level 4 and 5, it must handle failures without relying on a driver to rescue it.
The autonomy “stack” in simple terms
| Layer | What it does | Why it matters |
| Sensors | Gather data about the world | Determines what the system can perceive |
| Sensor fusion | Combine sensor inputs | Improves reliability and coverage |
| Perception | Detect lanes, cars, pedestrians | Enables safe driving decisions |
| Prediction | Estimate what others might do | Helps avoid risky moves |
| Planning/control | Choose path and execute smoothly | Comfort and safety |
| Monitoring | Watch driver or system state | Defines safe use boundaries |
Perception: seeing the road
A system can only react to what it detects. Perception involves detecting objects and understanding what they are. It includes vehicles, bicycles, pedestrians, signals, lane markings, road edges, and obstacles.
Perception can be challenged by glare, rain, fog, dirty sensors, low light, or unusual objects. It can also struggle in complex scenes, like crowded intersections or construction zones with temporary lanes.
That is why higher levels need stronger redundancy and better handling of uncertainty. A safe system must recognize when it is less confident and respond by reducing capability or shifting to a safe state.
Prediction and planning: deciding what to do
After detecting objects, the system must predict motion. It must guess if the car ahead will brake, if a pedestrian will step into the road, or if a vehicle will merge. Prediction is never perfect, so the system plans conservatively.
Planning decides where the car should go and how it should get there. Control turns that plan into steering and braking actions. Good planning feels smooth. Poor planning can feel jerky or indecisive, which can create safety issues if it surprises other drivers.
Higher levels demand better prediction and planning because the system carries more responsibility. It is not enough to “usually” behave correctly. It must handle a broad range of common situations consistently.
Driver monitoring and human factors
Human behavior is a major safety variable. At Level 2, the driver must stay engaged. So systems often use steering-wheel checks, camera-based attention tracking, or both. The goal is to prevent misuse, like sleeping or looking away for long periods.
At Level 3, the human factors problem changes. If the system is doing the driving and monitoring, the driver may become less prepared to take over quickly. That is why takeover prompts must be clear, timely, and designed around real human reaction time.
At Level 4 and Level 5, the system cannot rely on a human to save it. That increases engineering demands for fault handling and safe fallback behavior.
Safety, regulation, and responsibility
Safety is the main reason the levels matter. The levels help clarify what a driver should expect and what a system is designed to do. Without clear expectations, people can misuse features and take risks they do not understand.
Responsibility changes across levels. At Levels 0–2, the driver is responsible for monitoring the road and responding to hazards. At Level 3, the system monitors within its ODD but may ask the driver to take over. At Levels 4–5, the system is designed to handle the driving task and fallback behavior within its domain.
Regulation varies by country and region, and it often evolves as technology evolves. Some regions allow limited higher-level systems under strict conditions. Others are more cautious. For everyday drivers, the most practical guidance is to follow the vehicle’s official instructions and treat the ODD as a real safety boundary.
A helpful mental model is this: capability does not equal permission. Even if the car can do something, the rules and safe-use guidance may limit when you should use it.
Safety responsibilities by level band
| Level band | Who should monitor the road? | Who must act in an emergency? |
| 0–2 | Human | Human |
| 3 | System (within ODD) | Human when requested |
| 4–5 | System | System |
Common myths that cause accidents
Many safety problems come from misunderstanding, not hardware. Here are myths that appear again and again:
- Myth: Level 2 means the car drives itself.
- Myth: Hands-free means eyes-off.
- Myth: A feature name guarantees a certain level.
- Myth: The system will always warn you before it fails.
The safest approach is cautious use. Assume the system has limits. Assume it can disengage. And assume you should know those limits before relying on it.
What level are we at today? A realistic snapshot
Most vehicles on public roads today fall into Level 0, Level 1, or Level 2. This makes sense because those levels deliver real benefits while keeping the human driver responsible. They reduce fatigue and can improve comfort, especially on highways.
Level 3 exists, but it is typically limited in availability and conditions. That is not necessarily a sign that Level 3 “doesn’t work.” It is a sign that deploying a safety-critical system requires strict constraints, careful validation, and a clear operating domain.
Level 4 is often most practical in controlled environments. It can operate in specific areas or routes where conditions are predictable and the system can be tested thoroughly. That is why much of Level 4 progress appears in limited deployments rather than broad consumer features.
Level 5 remains the long-term target. The path toward it is not only about better sensors and better software. It is also about handling rare events, building trust, and proving safety in a wide range of conditions.
Where you’re most likely to see each level
| Level | Most common environment | Why it fits there |
| 0–1 | All roads | Simple assist and alerts |
| 2 | Highways | Structured lanes and predictable flow |
| 3 | Narrow highway scenarios | Handoff and domain limits |
| 4 | Specific mapped zones/routes | Controlled ODD |
| 5 | Not typical today | “All roads, all conditions” challenge |
How to evaluate an automation claim before you trust it
If you want a quick way to judge any system, use questions instead of brand names. A good checklist protects you from overconfidence and helps you use features safely.
Start with monitoring. If you must watch the road continuously, you are still the primary driver. Then check the ODD. If the system only works on certain roads, at certain speeds, or in certain weather, those limits are critical. Finally, check fallback. If the system reaches its limit, who is expected to save the situation?
This checklist is also helpful when comparing cars. Two systems may both be “Level 2,” but one may have stronger attention monitoring and clearer limits, while another may behave more unpredictably. The level tells you the responsibility. The details tell you the real-world experience.
Here are practical questions you can ask before trusting any feature:
- Do I still need to watch the road every second?
- Does the car claim it monitors the environment within a defined domain?
- Where is it designed to work, and where is it not designed to work?
- What does it do when lane lines disappear or weather worsens?
- Does it give a takeover request, and how much time do I get?
- Does it slow down or stop safely if I do not respond?
- What do the official manual and on-screen warnings say?
Quick “trust test”
| Question | If the answer is yes | What it suggests |
| Must I watch the road constantly? | Driver assistance | Likely Level 0–2 |
| System monitors road within limits? | Automated driving features | Level 3+ within ODD |
| Works only in certain conditions? | Strong ODD dependence | Level 2–4 behavior |
Final Thoughts
Autonomy is not magic. It is responsibility shifting from human to system in measured steps. The SAE scale is useful because it makes that shift visible and easy to compare.
If you drive a modern car today, you are most likely using Level 1 or Level 2 features. They can reduce workload, but they still demand attention. The biggest safety risk is not using these systems. It is misunderstanding them.
The smartest way to stay safe is to use the levels as a reality check. Ask who monitors the road, what the limits are, and who handles the fallback. When you do that, the noise fades and the truth becomes clear: autonomous driving levels 0–5 are less about hype and more about clearly defined roles.
FAQs
What are the six levels of driving automation?
The six levels run from Level 0 to Level 5. Level 0 has no sustained automation. Level 1 assists with either steering or speed. Level 2 assists with both at the same time but requires the driver to monitor the road. Level 3 can monitor the environment within its limits but expects the driver to take over when requested. Level 4 can drive and handle fallback within a defined domain. Level 5 aims to drive anywhere in all conditions a human could handle.
What is the main difference between Level 2 and Level 3?
The biggest difference is who monitors the road. At Level 2, the driver is responsible for monitoring the driving environment at all times. At Level 3, the system monitors the environment while it is engaged, but it may request that the driver take over when it reaches its limits. That handoff is why Level 3 is more complex and more restricted.
Does hands-free driving mean the car is self-driving?
Not necessarily. A system can allow hands-free steering and still be Level 2 if the driver must monitor the road continuously. Hands-free describes how you hold the wheel, not who is responsible for watching the environment. Always confirm whether the system expects you to stay attentive and ready to act.
Are there any fully self-driving cars available to consumers today?
Most consumer vehicles today offer Level 1 or Level 2 features. Higher levels tend to be limited by operating conditions, geography, or specific scenarios. The term “fully self-driving” is often used loosely, so it’s more accurate to ask what the system is designed to do, under what limits, and what the driver must still do.
Why is Level 5 so hard to achieve?
Level 5 requires handling the full variety of real-world driving. That includes unusual events, unpredictable road users, and extreme conditions. Humans rely on common sense and social cues in these moments. Teaching a system to handle all of those situations reliably, everywhere, is a much bigger challenge than operating safely in a limited domain.
What does ODD mean and why should I care?
ODD stands for operational design domain. It defines where and when an automation feature is designed to work safely. ODD can include road type, speed range, weather limits, and geographic boundaries. Understanding ODD helps you avoid using a feature outside its safe operating limits.